研究活動

バランス特性を考慮したスマートビークルの開発
[研究担当] 園部 元康
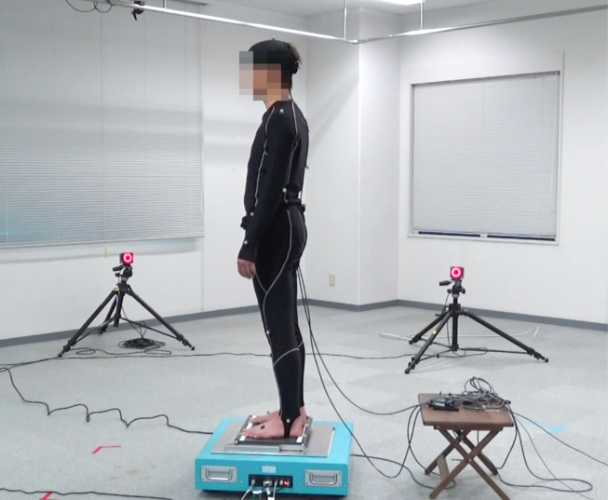
代表的なスマートビークルであるSegwayは傾斜する車体を制御しますが、この研究では人体の傾きを乗り物が検知して制御することを目指しています。それを実現するために、重心位置を足裏の力覚センサで推定し、人体の運動特性は事前に計測した応答データから同定して、制御則に組み込みます。人が倒れないように安全に運ぶことができる移動体であると同時に、バランスのリハビリ機器としての活用も想定しています。